Overview
We were tasked to re-create the TraceTogether token functionality using SensorTag CC2650. Each node will experience two states, DETECT and ABSENT.
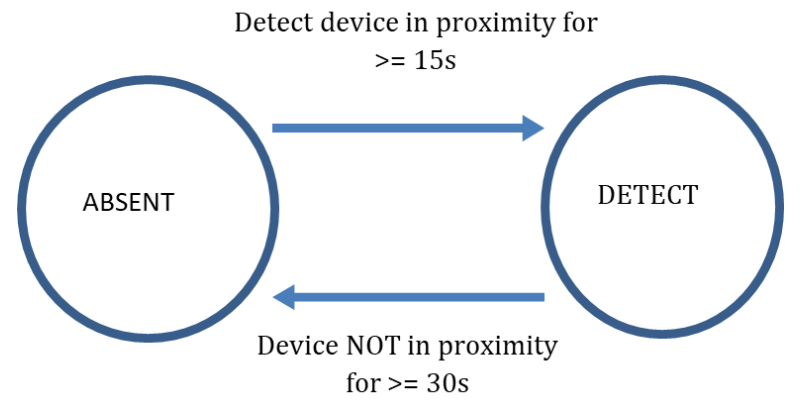
(State Transition Diagram)
In our proposed solution, we used a modified version of the Quorum-based algorithm to implement a deterministic neighbour discover of nearby beacons.
Project Components
(CC2650 RTOS)
- CC2650: transceiving tokens x 4
Proof of Concept
Here, we re-created 6 scenarios to test for the robustness of our application firmware. The scenarios are as follows:
- Test Case #1: Two nodes come into range of each other
- Test Case #2: Two nodes goes out of range of each other
- Test Case #3: The two nodes come in range of each other for 15s. Subsequently, the two nodes go out of range of each other for 30s
- Edge Case #1: Irregular detection of nodes. The two nodes come in range of each other for less than 15s and go out of range for at least 2s. The two nodes come into contact again for the full 15s. This is to simulate an event where the two nodes are in close proximity, but is only for a short period for less than 15s
- Edge Case #2: Irregular detection of nodes. The two nodes are in DETECT state. The nodes go out of range for 2s and come back into range. This is to test the limits of the device at a maximum range of 3m. As the RSSI received at the maximum range is spurious, there may be packet loss which results in false detection of ABSENT states
- Edge Case #3: Multiple nodes in the same area to simulate a multi-node network
The results are summarised in the PDF shown below:
(Result Summary)